







































The emerging wave of automation is making material handling safer, faster, and more cost-effective.
While manual labour is still seen as low-cost way of material handling, it has a high potential for injuries. On the other hand, material handling automation can reduce workplace injuries by up to 72%. Automated or semi-automated material handling equipment redresses the concerns faced during manual handling of material and takes a pro-active approach towards safety, efficiency, and cost-saving.
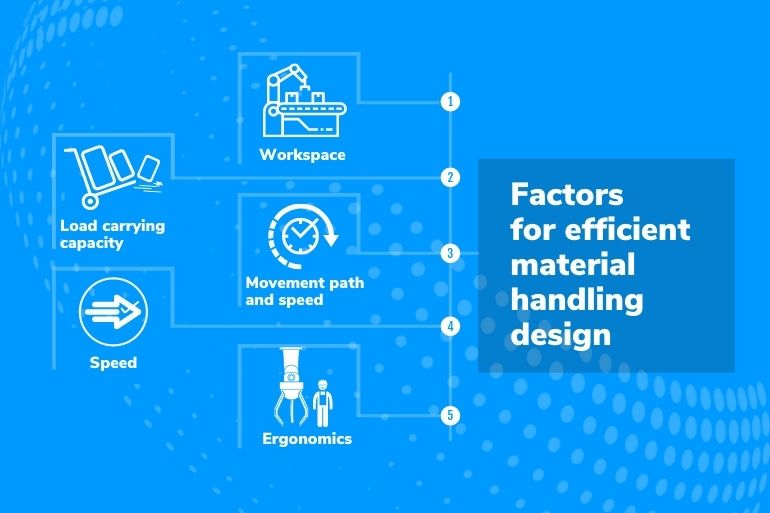
Material handling design principles should address these 5 factors for an efficient solution
Workspace
Workspace is defined as the area covered by the end-effector of the material handling equipment. It is the space within which the robot or manipulator will operate. The nature and scale of the task plays a role in determining the workspace of the manipulator. The intrusion of the machine itself on the workspace also impacts its design.
In an average manufacturing facility, around 55% of the floor space is occupied by machines.
The available space for operation will determine the kinematic design of the material handling equipment. Restricted workspace can negatively affect the available kinematic configuration.
Load carrying capacity
The amount of load which can be carried by the manipulator is impacted by its dynamic properties, limitations of the actuator and joint elasticity. The desired load carrying capacity will determine the size of the material handling equipment, its power transmission system and actuators.
There are two key material handling design principle challenges in designing the load carrying capacity of a manipulator
If the equipment is designed to exceed the desired load carrying capacity, the user will incur high power costs. On the other hand, if the equipment is under-capacity, it could cause damage to the material, and lead to accidents.
Movement path and speed
The movement path or trajectory of a material handling equipment impacts its efficiency. There are two key constrains that guide the design of manipulator trajectory: The body of the manipulator itself, and the nature of the task to be performed. An ideal trajectory design should follow 4 key material handling design guidelines:
Speed
Bringing speed to material handling is of course one the core goals of material handling design process for industrial manipulators. Do note that the nature of material handling process is a key influencer on the manipulator speed. In many cases, the nature of the task itself tends to limit the speed of the process. Handling of fragile glass can be an example.
Movement speed of the manipulator is not the only factor to consider in the material handling design process if you want to reduce the equipment’s overall cycle time for a task. Pick and place applications require the manipulator to accelerate and de-accelerate before it moves between locations. The acceleration and de-acceleration often require most of the cycle time. Therefor, alongside peak speed, the acceleration capability is also a key material handling design principle to be considered.
Ergonomics
Studies suggest that 32% of workplace injuries occur in course of material handling. Smart material handling systems and semi-automatic solutions such as industrial manipulators eliminate or drastically reduce workplace injuries. Factors such as stiffness of the manipulator impact its ergonomic performance.
An ergonomically safe manipulator should not just eliminate the strain in lifting of the load for workers, but also take care of the inertia during acceleration, breaking and direction changes of the machine. Manipulators that have the right degree of stiffness in operation are beneficial in this respect.
Conclusion
Automated material handling equipment have been proven to improve ergonomic safety at workplaces. They reduce workplace accidents, improve visibility, boost productivity as well as employee wellness. Despite the efficiency and safety brought by automation, the initial investment, and future maintenance costs remain key concerns for businesses. To address these issues, businesses must be aware about sourcing the machines and spare parts from authorized agencies and OEMs.
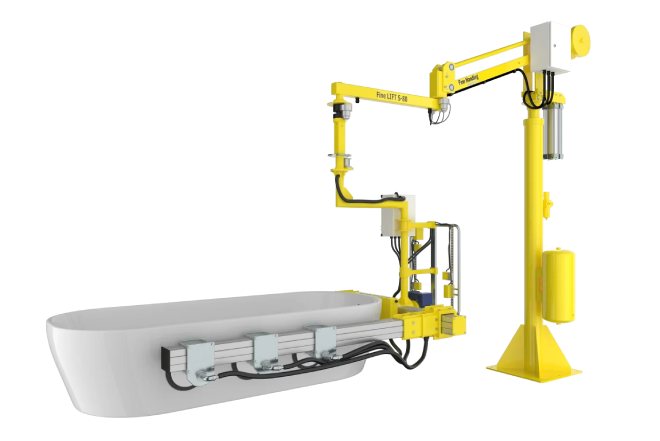
Fine Handling has 15+ years of experience in designing smart material handling systems. Endowed with a state-of-the art design center and world class material handling design process, the Fine Handling works closely with you to understand your needs and offer a customized material handling solution.
Going beyond sales, our dedicated post sales arm ‘Fine Hand’ offers expert consultation, training, and repair service during the lifetime of our products. Annual maintenance contracts further serve to ensure that our products deliver a Fine performance over their entire service life.