







































Effortless handling of Stub knuckle on the machining line

Effortless handling of Stub knuckle on the machining line
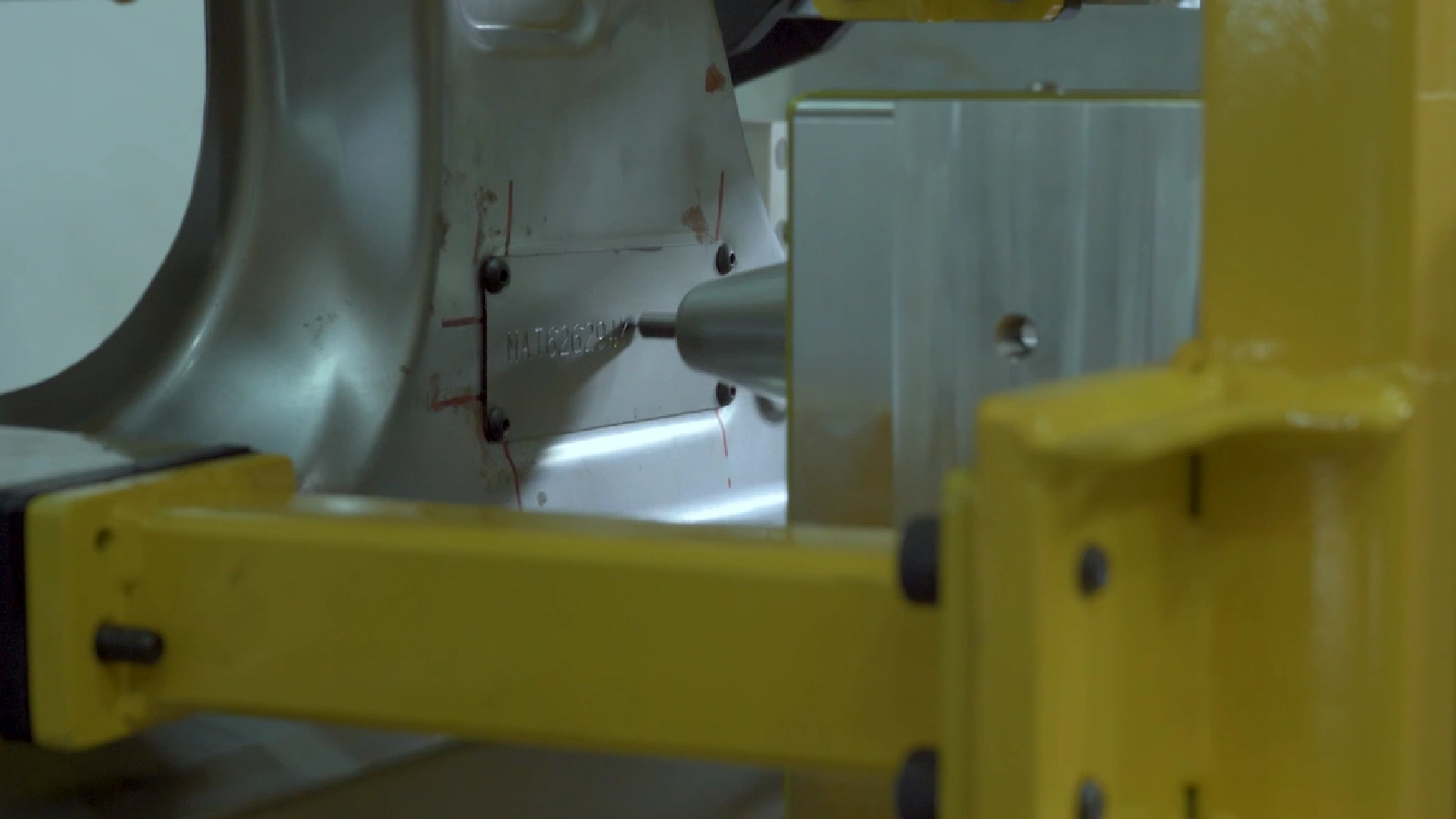
A Kolkata based manufacturer and global supplier of die forgings had a requirement of a solution for carrying stub knuckles, a component of car axle assembly, from 1 machine to other and it was a difficult task as the weight of a stub knuckle could be as high as 40 -50 kg. They were already using FH&A’s manipulators for a similar application, so they placed an order of another 4 similar manipulators with a slight modification.
Challenges
- Gripping - especially at the top of the stub knuckles for horizontal loading
- Changing the orientation the lengths and angles of the arms of stub knuckles are not symmetrical.
- Ensure any accidental damage to the hood due to gripper contact
Solution and Benefits
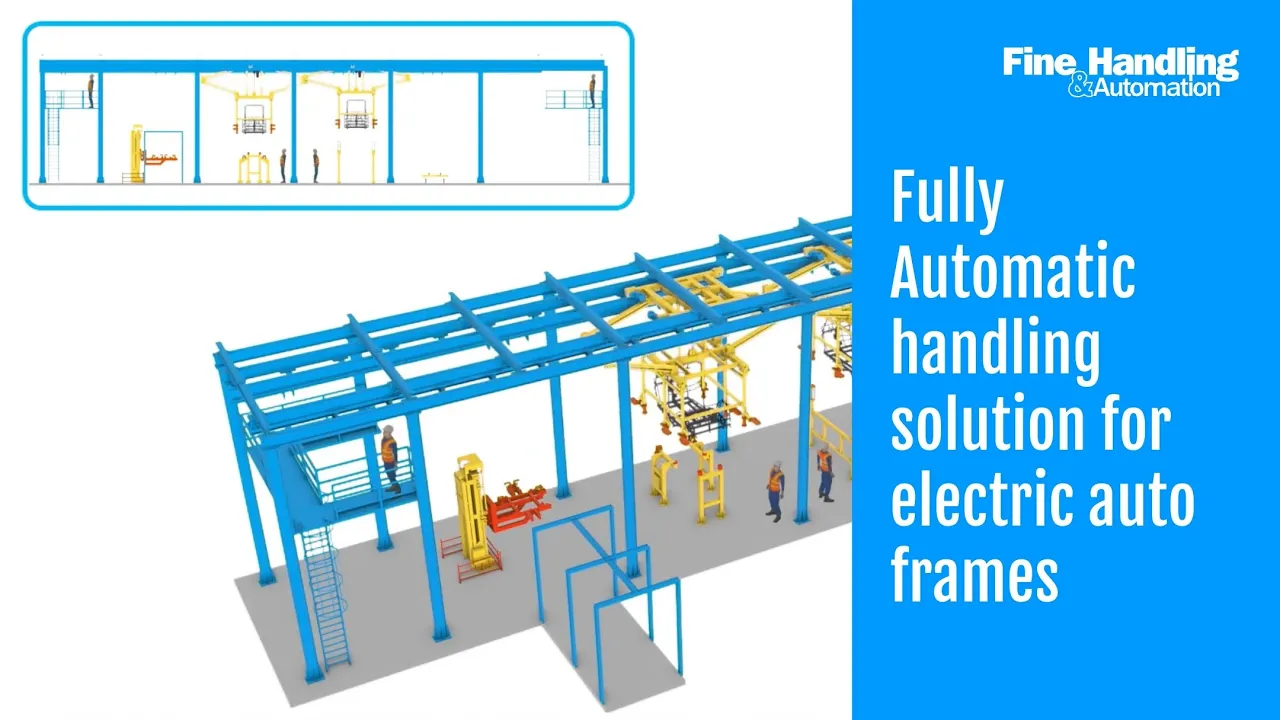
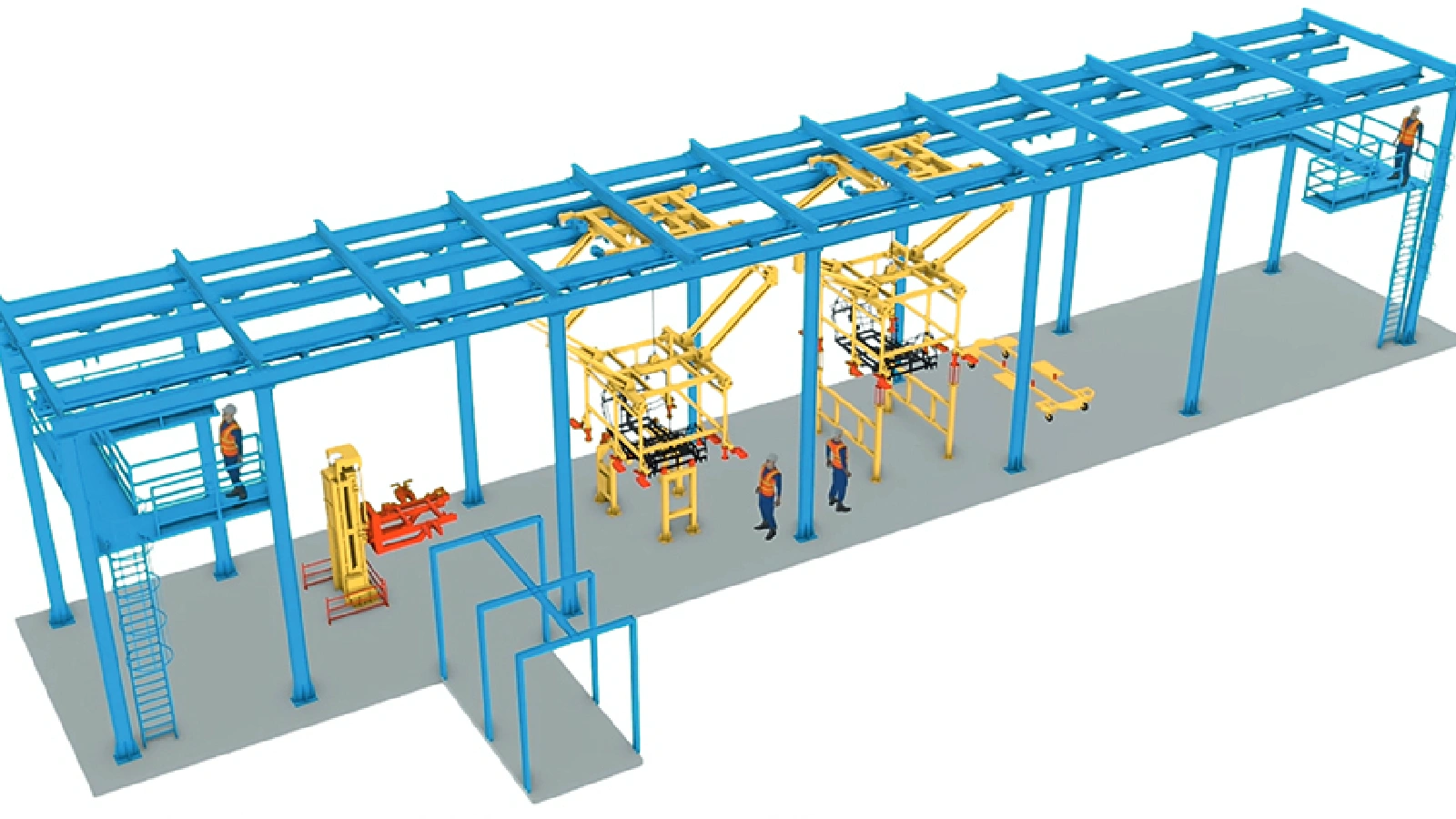
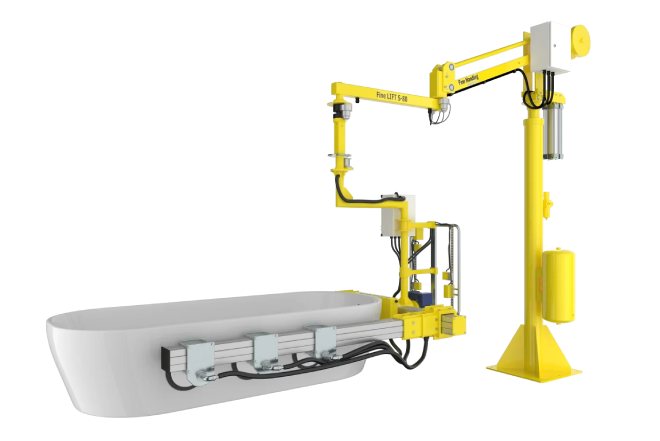
- Pneumatically operated manipulator which can lift, carry, load and unload stub knuckle.
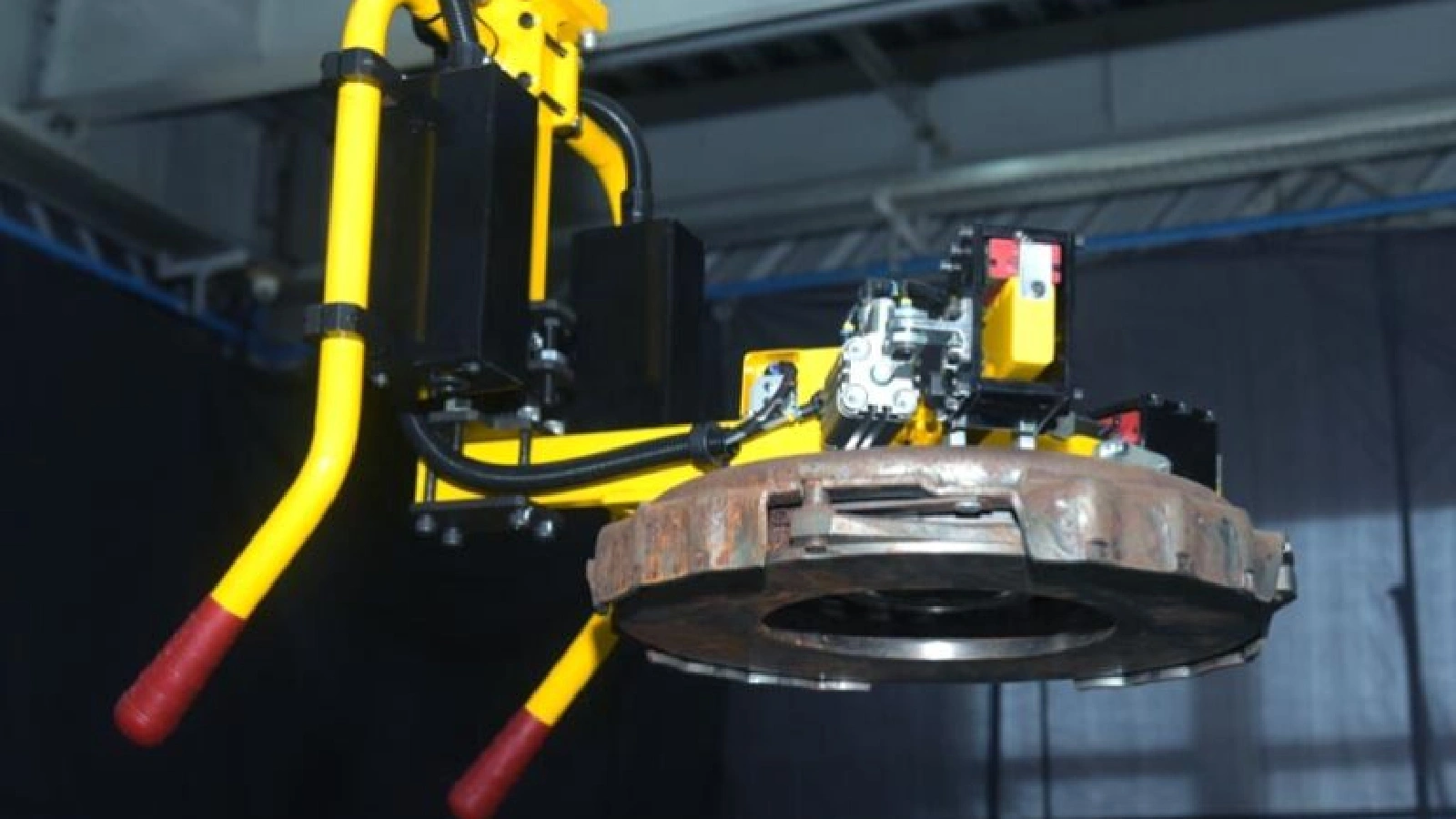
- The Clamping Manipulator for turning process was designed in such a way that it will clamp the knuckle on its shaft and load it vertically into the machine
- Ensuring Safety of operators FH&A provided many safety features to these manipulators.
- Safety of manipulator was equipped with a sensor to ensure proper clamping of the component.